


Kom över en gammal klassisk IRB6 för ett par år sedan och har lite från och till funderat över hur man får till ett lämpligt styrsystem till den.
Min första tanke var en enkel point-to-point-styrning utan någon inverterad kinematik, men det är ju rätt tråkigt.
Vad jag har förstått så har LinuxCNC stöd för detta. Denawit-Hartenberg-parametrarna räknade jag ut någon gång vill jag minnas.
Motorerna är enkla DC-motorer som jag monterat encodrar på till förmån för de resolvers som satt där förut. Tänkte använda UHU-drivers för att driva dessa. Under helgen har jag gjort ett litet stativ till roboten så jag kan ställa den i lämpligt hörn hemma istället för att ha den i verkstaden.
Har ingen erfarenhet av LinuxCNC. Skulle vilja bygga med en relativt robust PC av embeddedmodell. Gärna Atom-baserad och fläktlös. Vill inte förlita mig på någon gammal maskin med parallellport, så jag har kollat efter alternativ. Ser ut som att MESA-korten ska vara rätt fina. Dessutom är priset fint.
De har ju en hel radda "plug-and-go kit" (länk) som ser bra ut.
Vore intressant att höra om eventuella erfarenheter av dessa. Hur funkar integreringen med LinuxCNC? Har någon annan här inne satt upp en 5-axlig robot med LinuxCNC?
Nytt styrsystem till asea IRB6
Nytt styrsystem till asea IRB6
Du har inte behörighet att öppna de filer som bifogats till detta inlägg.
Re: Nytt styrsystem till asea IRB6
Alldeles efter att jag postat detta så hittade jag ett intressant alternativ.
LinuxCNC på Beaglebone Black med ett sådant här kort (länk).
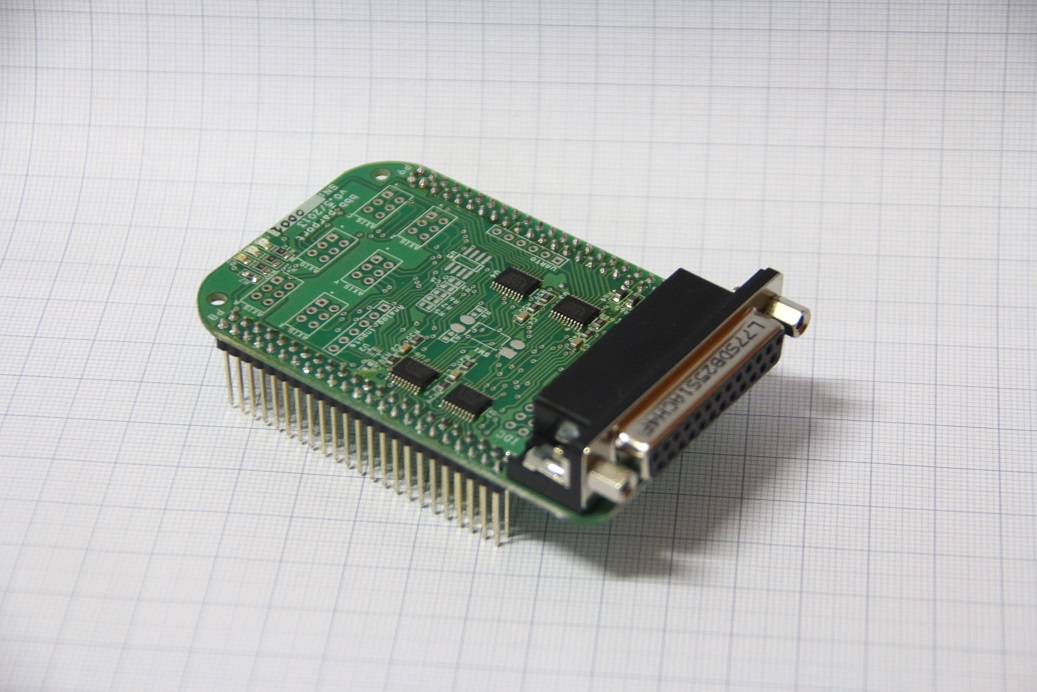
Även där är jag intresserad av era erfarenheter. Har endast arbetat med Mach3/Mach4 och Smoothstepper, eller industriella system tidigare.
LinuxCNC på Beaglebone Black med ett sådant här kort (länk).
Även där är jag intresserad av era erfarenheter. Har endast arbetat med Mach3/Mach4 och Smoothstepper, eller industriella system tidigare.

Re: Nytt styrsystem till asea IRB6
Mesas produkter är riktigt bra, de har för närvarande leveransproblem vad jag förstår.
De har en ethernet baserad controller vilket borde vara till stor fördel för då kan du köra nästan vilken pc och formfaktor du vill.
Till Beaglebone utvecklas machinekit vilket är en fork av linuxcnc med stöd för mer saker.
Vet inte om beaglebone backpacken klarar att läsa encoders i hårdvara?
Med ett 7i80 + 7i77 från mesa så har du hw räknare för encoders på 6 axlar samt analog +-10v styrning.
De har en ethernet baserad controller vilket borde vara till stor fördel för då kan du köra nästan vilken pc och formfaktor du vill.
Till Beaglebone utvecklas machinekit vilket är en fork av linuxcnc med stöd för mer saker.
Vet inte om beaglebone backpacken klarar att läsa encoders i hårdvara?
Med ett 7i80 + 7i77 från mesa så har du hw räknare för encoders på 6 axlar samt analog +-10v styrning.
Re: Nytt styrsystem till asea IRB6
Uhu-servodrivarna kör closed loop och kräver endast step- och dirsignaler. Behöver alltså inte koppla några encoders till controllern.
Ska kolla på den ethernet-baserade Mesa-enheten.
Ska kolla på den ethernet-baserade Mesa-enheten.
Re: Nytt styrsystem till asea IRB6
Tänker du dig dessa som drivare?
http://www.uhu-servo.de/servo_en/index.htm
Tänker mig att tuningen i de korten kan bli lite problematiska om de inte har bra verktyg?
Mesa har drivare med, dock inte jag jobbat med.
http://www.mesanet.com/motioncardinfo.html
Fördelen som jag kan se det om du väljer att sluta loopen i linuxcnc genom att få in encodersignalerna dit är att du får enklare att tuna axlarna.
i linuxcnc har du halscope som ett hjälpmedel bland annat.
Men det är då fördel att ha drivare som tar +-10v eller att de körs med PWM helt.
Detta kort (7I76E) borde du klara dig på om du skall köra step+dir endast.
http://store.mesanet.com/index.php?rout ... earch=7i76
http://www.uhu-servo.de/servo_en/index.htm
Tänker mig att tuningen i de korten kan bli lite problematiska om de inte har bra verktyg?
Mesa har drivare med, dock inte jag jobbat med.
http://www.mesanet.com/motioncardinfo.html
Fördelen som jag kan se det om du väljer att sluta loopen i linuxcnc genom att få in encodersignalerna dit är att du får enklare att tuna axlarna.
i linuxcnc har du halscope som ett hjälpmedel bland annat.
Men det är då fördel att ha drivare som tar +-10v eller att de körs med PWM helt.
Detta kort (7I76E) borde du klara dig på om du skall köra step+dir endast.
http://store.mesanet.com/index.php?rout ... earch=7i76
Re: Nytt styrsystem till asea IRB6
Ja tuning av servoloopar kan ju vara lite knivigt ibland. Har byggt ihop en UHU-driver (den du länkade till) och tänkte prova den på en axel. Med lite flyt så fungerar det bra. I sådant fall bygger jag fyra till.
Det är väl en fråga om kostnad. Finns många drivers för DC-servos, men inte så många som inte kostar minst tusen kr per styck.
Det är väl en fråga om kostnad. Finns många drivers för DC-servos, men inte så många som inte kostar minst tusen kr per styck.
Re: Nytt styrsystem till asea IRB6
Jag varken försöker eller vill "lura på dig" nått du inte behöver men om du vill ha en UHU-kompatibel processor med bättre prestanda så kan jag rekommendera min* processormodul. Kostar lite mer än ett UHU-chip men har en del features som originalet saknar.
* Ja, det är jag som utvecklat den och jag som säljer den.
* Ja, det är jag som utvecklat den och jag som säljer den.

Re: Nytt styrsystem till asea IRB6
Det här är intressant! Min IRB6-L står orörlig i garaget sedan något i styrsystemet (ASEA S2) packade ihop och jag har inte haft tid att felsöka något på den.
Hade du något utav originaldrivningen till din robot?
Jag har inte ens kollat vad för styrning det är in till original dc-motordrivdonen, har du någon info om detta?
Hade du något utav originaldrivningen till din robot?
Jag har inte ens kollat vad för styrning det är in till original dc-motordrivdonen, har du någon info om detta?
Re: Nytt styrsystem till asea IRB6
Undrar om inte vi varit i kontakt förut. Pysslade lite med denna för ett par år sedan och kom då i kontakt med någon som hade en likadan.
Har ingen originalstyrning. Motorerna har både resolvers och tachometer. Antar att det kan ge bättre prestanda. Jag tänker köra med endast encoder.
Har ingen originalstyrning. Motorerna har både resolvers och tachometer. Antar att det kan ge bättre prestanda. Jag tänker köra med endast encoder.
Re: Nytt styrsystem till asea IRB6
Jo jag fick också den känslan och började kolla i mina gamla PM o visst var det vi som skickade endel fram o tillbaka. 
Kul att du tagit upp det här igen!
Jag följer med spänning. Angående resolver och tacho så misstänker jag att det är för säkerhet/redundans/diagnos utöver precision. (resolvern har väl en grym noggrannhet om jag minns rätt efter alla år)
Kul att du tagit upp det här igen!
Jag följer med spänning. Angående resolver och tacho så misstänker jag att det är för säkerhet/redundans/diagnos utöver precision. (resolvern har väl en grym noggrannhet om jag minns rätt efter alla år)
Re: Nytt styrsystem till asea IRB6
Kul projekt! Tänker du göra egna UHU kort eller köper du ett kit? Isf vilket?
Drömmer själv om att få tid över för att bygga en liten robotarm
Drömmer själv om att få tid över för att bygga en liten robotarm
Re: Nytt styrsystem till asea IRB6
Jodå det är spännande. Dock inte det enda projektet man håller på med... 
Har köpt två sådana här kort. Om den jag byggt ihop fungerar bra så beställer jag fler.
Har köpt två sådana här kort. Om den jag byggt ihop fungerar bra så beställer jag fler.
Re: Nytt styrsystem till asea IRB6
Vad är det för data (spänning och ström framför allt) på motorerna?
Uli Hubers UHU-chip är riktigt imponerande med tanke på att hela rasket är implementerat i en mikrocontroller med bara 2k FLASH. 250kHz är enligt min erfarenhet dock en utopi, när jag använde UHU-chippet började mina drivare "tappa steg" vid ungefär halva den frekvensen - vilket i många fall är mer än tillräckligt men kan vara bra att känna till.
Uli Hubers UHU-chip är riktigt imponerande med tanke på att hela rasket är implementerat i en mikrocontroller med bara 2k FLASH. 250kHz är enligt min erfarenhet dock en utopi, när jag använde UHU-chippet började mina drivare "tappa steg" vid ungefär halva den frekvensen - vilket i många fall är mer än tillräckligt men kan vara bra att känna till.
Re: Nytt styrsystem till asea IRB6
H.O
Det är bra att känna till. Jag får helt enkelt räkna lite på pulsfrekvens. Om det ser kärvt ut så blir det kanske en liten affär för dig
Har inte motordata framför mig, men jag har konstaterat att de ska gå att köra på 24V, om än inte med maximala prestanda. Tror de klarar uppåt 30 V eller något sådant. Effekten var väl ett par hundra W per st.
Det är bra att känna till. Jag får helt enkelt räkna lite på pulsfrekvens. Om det ser kärvt ut så blir det kanske en liten affär för dig
Har inte motordata framför mig, men jag har konstaterat att de ska gå att köra på 24V, om än inte med maximala prestanda. Tror de klarar uppåt 30 V eller något sådant. Effekten var väl ett par hundra W per st.

