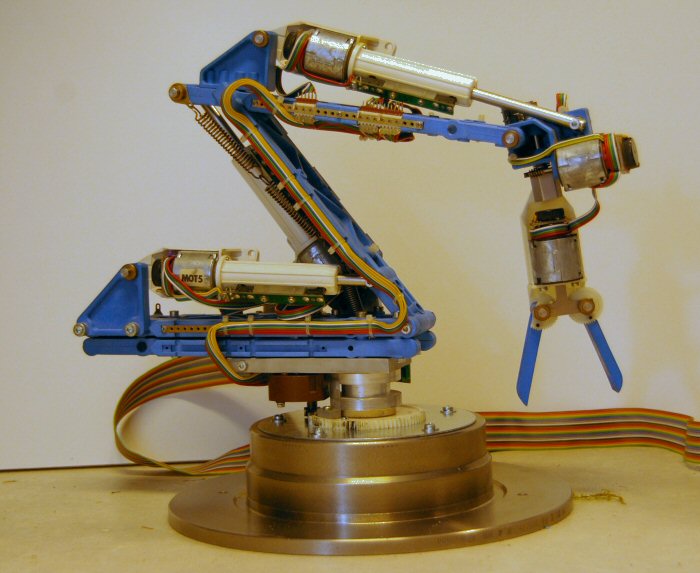
Inte är det en robot som lämpar sig för industriellt bruk, men den är ändå relativit kraftigt byggd, förutom gripklon som också är sönder. Alla motorer har optiska pulsgivare med 4 pulser per varv. Dessutom sitter det ändlägesbrytare (förutom på gripklon) som stoppar motorn vid ändlägena. Med styrboxen kan man manuellt köra alla 6 motorerna. Det fattas ett kort i styrboxen och jag antar att det är interfacet till datorn. Om jag blir riktigt inspirerad kommer jag att bygga ihop nåt så jag kan styra den via datorn, och då också utnytta pulsgivarna för positionering.
Armens konstruktion och dimensioner tillåter inte att man kör alla leder i botten i alla lägen, så om jag bygger ett datorinterface får datorn hålla reda på ledernas position och förhindra eller kompensera så att man inte kan köra fast nån led. Kan blir en intressant programmeringsuppgift.

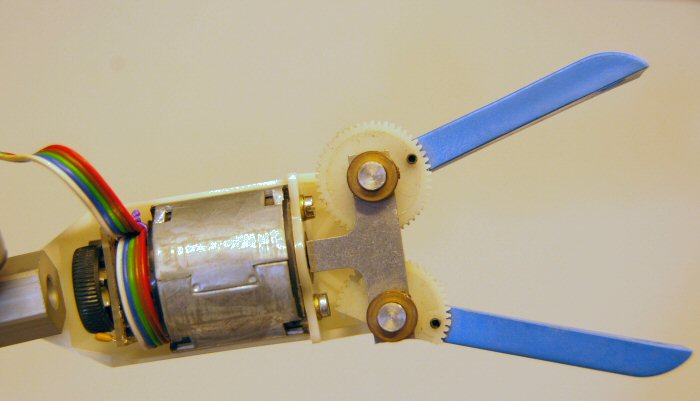
Gripklon är alltså sönder, och inte är det så konstigt. Det sitter två klena plastkugghjul (som blivit mos) som skruvas med en mässingsskruv som sitter på motorns axel. (Vad heter den här växeltypen?)
Var får man tag på nya och bättre kugghjul, helst metall? Kugghjulens ytterdiameter är 25,4 mm (1 tum) och har 50 kuggar. 6 mm axel.