Min fader har en båt.
Båten är en trevlig båt redan nu, men med en autopilot skulle den bli ändå bättre. Nytjas en del till dörjning av makrill och då skulle det vara bra med "något" som håller kursen...
Jag har en del tankar och idéer om hur autopiloten borde fungera och utseende, dock ingen koll på "elektroniken".
I min vision skall autopiloten bestå i (upp till) fem "delar":
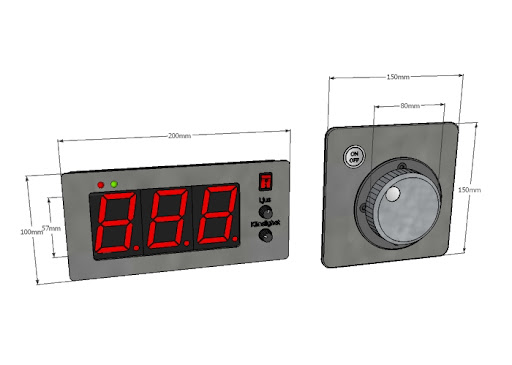
Huvudenhet: En "låda" som skall plaseras i hytten. Lådan skall innehålla: LED-display, till-från knapp, div. inställnings rattar/knappar, indikerings lysdiod, elektroniken, pumpmotrostyrningen, mm.
Kompass: En "låda" som kompassen sitter i, plaseras i fören för att komma långt bort från övrig elektronik som kan störa. (detta kanske inte är ett problem och då kan den plaseras i huvudenheten)
Styrenhet: autopiloten skall kunna styras från två platser, i hytten och på däck. Dom skall innehålla en "aktivera/avaktivera" knapp och en "ratt". Enheten i hytten kan vara en ganska simpel konstruktion, men den på däck bör vara vattentät och tåla en del "stryk", (utsat läge) det är också denna som kommer att användas mest. (Enheten i hytten kanske skulle kunna byggas in i huvudenheten...)
Funktionen på autopiloten har jag tänkt såhär:
När båtens huvudström slås på skall piloten starta. (skall inte behöva trycka igång den) Piloten skall då hamna i "standby" läge och aktuell kompasskurs skall visas på displayen. Skall kunna använda den som en vanlig kompass.
Om vi låtsas att vi är ute och åker båt, displayen visar att vi åker i 270 grader, vi trycker på "aktiverins knappen" och båten fotsätter i samma riktning. Om vi nu snurrar på "ratten" ett varv åt höger (har tänkt ca:40-60 pulser=grader/varv) kommer det att stå 320 på displayen. Båren girar styrbord och lägger sig på den nya kursen. Båtens girningshastighet är beroende av hur sanbbt ratten vrirs. Ratten vrirs ett varv på 0,5 sek= snabb gir, stort roderutslag, pumpen snurrar fort. Ett varv på 2 sek= mjuk fin gir, litet roderutslag....
I aktivreat läge skall ratten och displayen vara "sammanknutna" dvs, när ratten vrirs skall detta genast visas på displayen, sedan skall båten gira efter det som står på dislayen. Aktiverar du piloten i hytten skall du kunna styra och avaktivera på däck. Och tvärtom.
Tja... nu kommer vi till den delen som handlar om frågor.... (förvånad??
Vad tror ni? är det möjligt?
I vilken "ände" börjar jag? förstår ju att "mjukvaran" inte är så lätt för en som inte kan....
Era tankar kring detta mottages tacksamt....
/gurra
Postat: 11 september 2008, 21:59:01
av Icecap
Du vill ha kompass... leta reda på ett kompass med elektronisk utläsning i första hand, sedan anpassar man sig till det.
Styrenheten ute blir ett problem också... rent fysisk. Display och rattsensorer bör avläsas på plats och data skickas som RS422 eller RS485, det ger störsäkerhet och intelligens vilket är bra.
Roderlägessensorn kan också vara "intressant".
Själva funktionen är inget större problem, det är "bara" att programmera en mikroprocessor... en PID-reglering med variabel faktor för D skulle klara biffen, att D-faktorn ska vara variabel är för att den ska kompensera för snabba/långsamma rattutslag. Då det kan vara trevligt med lite funktioner i detta och inte behöva snika på plats i programminnet hade jag vald en Renesas M16C-processor... men det väljer jag till nästan allt så ta det med en nypa salt.
Som jag ser det är det alltså de mekaniska delarna som är svårast att få till på ett tillförlitligt sätt.
Fullt möjligt
Postat: 13 september 2008, 05:54:10
av Eli
Jag byggde en autopilot för en del år sedan och använde en billigare lösning än hydraulpump.
Den bestod av en nerväxlad DC-motor med en förlängd axel ca 40 cm. Mot axeln klämmer en anordning som består as två st klotsar som har 3 st lite snedställda kullager i varje ända med justerbar fjäderkraft. (eg. 2 st och 1 på varje halva)
Denna hakas i roderet via länkstång.
Man kan ev, bara ha en gängad stång i stället , men min lösning gör att man får en justerbar friktionskoppling så att man snabbt kan ta tag i ratten och vrida vilket behövdes ibland då jag t.ex. mötte större fartyg eller gick under metallbroar som påverkade el -kompassen så att den styrde rakt mot dem.
Gjorde även elkompassen själv. Den består av
en ringformad ferritkärna med 3 lindningar på
En lindning för pulsad magnettisering och 2 lindningar vinklade 90 grader för avläsning.
Funktion: Pulserna mättar kärnan men beroende på yttre jordmagnetfältet som adderas till så kommer mättnaden att bli olika i de olika riktningarna och skillnaden kan läsas av,
Nackdel: Fungerar bäst vid ekvatorn där magnetfältet är horisontellt, men även sjögång påverkar, så den bör hängas upp ledande och helst med gyrostabiliseing.
Postat: 13 september 2008, 08:24:02
av Icecap
Jepp, en "fluxgate"-kompass borde vara en bra grej till detta. Viktigt är dock att ha en visning så att man kan kontrollera visningen.
Och sedan om man ska ha hydraulik eller friktionskoppling... det beror ju på VAD man vill uppnå. Om det är en permanent elektromekanisk styrning som är önskvärd är hydrauliken en bra idé, jag skulle dock ha sett till att man kan frikoppla rorskulten illa kvickt manuellt, saker kan gå sönder ju.
Postat: 13 september 2008, 22:21:16
av gustav t
Styrningen på båten är redan hydraulisk, så det får bli det alternativet.
Styrenheten ute behöver kanske inte vara vattentät, dock vattentålig. Har en idé om detta. Vår lokala "smed" får fixa det
Roderlägessensor, är det nödvändigt? Ändlägesbrytare är nog bra, men behöver "datorn" veta vinkeln på rodret? Kan den inte räkna ut det på girningshastigheten?
Kompass, visste inte att man kan bygga en själv. "Fluxgate" hur funkar en sådan, vad för nogranhet har den? kan tänka mig att "vändglappet" inte får vara för stort. http://www.electrokit.se/item_show.php?code_no=41002882 en sådanhär, skulle det vara ett alternativ? kanske inte just den men något liknande....
Programmeringen är mycket över min förmåga, just nu. jag vet att det är en fråga som är besvarad en massa gånger men, hur/var startar man, kan man lära sig detta på ett halvår??
Att lära sig det på ett halvår går... men det blir till att avsätta en del timmer om du har noll erfarenhet, alternativt hyra ut jobbet men det kan får kompass-kostnaden att lika ett piss i havet.
Electrokit-grejen kan fint duga, förutsatt att man placerar den rätt.
Jag tror inte ett skvatt på att det blir "vettigt" utan en roderläge sensor eller rättare: det kan fungera men det finns mycket stor risk att båten kommer att gå som det var en mycket full som styr den.
Du bör alltså lära dig så mycket mikroprocessor (µC) att du på ett halvår kan dels designa en lämplig styrning och dels programmera den...
Det kan verka besvärligt men det går nog om du tar det i steg och väljer rätt verktyg. Främst är det programmeringsspråket sm kan ställa till det, vanligen rekommenderar jag ASM för nybörjare då det ger en mycket bra förståelse för hur en µC fungerar och jobbar men då du ska utföra en del skapligt avancerat funktioner hade jag föreslagit C direkt.
Och sedan vilken C... JAG hade tagit en Renesas M16C, dels för att jag har använd den till mycket annat och dels för att jag har verktygen och också för att den är väldig kompetent. Det finns dock andra processorer som duger alldeles bra, vissa vill påstå att AVR är det enda som duger, andra svär till PIC osv.
Det viktiga är att arbetsmiljöet passar dig, i slutskedet är alla processorerna kapabla att utföra funktionerna i lagom hastighet så det är lite huggit som stuckit vilken som är "bäst".
Men om du inte brinner för programmering och verkligen vill lägga tid på att gå från "jipiiii... lampan blinkar" till "ja, då så, nu verkar jag ha kontakt med kompassen" kan det bli en hård kamp på ett halvår.
Postat: 14 september 2008, 12:25:19
av xxargs
Sedan bör du ha klart för dig själv om det är målet som är det viktiga (infria ett löfte) eller om det är resan till målet som är det vikiga (den roliga pillande och lärandet att till slut få grejorna att lira) där deadlinen om ett halvår inte är så viktig att infria till 100% eller ens alls...
Det är en jäkla skillnad på inställning till projektet om du har prestationspiskan vinande på ryggen och du 'bara' måste få fram något i jämförelse med att pilla med något som börja blinka och du upptäcker att klockan redan är halv 3 på morren utan att du märkte det bara för att det är så jäkla kul att utforska prylarna.
Man kan säga så här - kör man med den första inställningen så är risken för missyckande väldigt stort och det hela blir allt pinsammar ju längre tiden går mot 'beställaren' medans kör man den andra inställningen och är riktigt envis så är det stor chans att lyckas, även om det inte alls ser ut som det var tänkt från början och det kommer ta PI gånger längre tid än beräknat - men du har jäkligt kul under tiden och lär dig många saker - från programering till praktiska mekaniska lösningar!
Man måste 'känna' och nästan vara passionerad för projektet om det skall bli lyckat! Då spelar det ingen roll att man är nybörjare på många områden då man lär sig en massa på vägen för att komma vidare i sitt projekt och det får ta den tiden det tar. Har man tidspress utifrån så blir det lätt 'skrivkramp' och man får inte något gjort alls.
Postat: 14 september 2008, 21:08:04
av gustav t
XXargs... Mycket bra skrivet!! Hamnar ofta i den stisen, planering - roligt, ritning - roligt, att påbörja roligt, att slutföra brukar vara svårare.
Nu har jag ju ett mål, vilket är bra. leveransdatum har jag inte, vilket är bra. Grundkunskap om denna typ av elektronik har jag inte, vilket inte är bra.
Förstår ju att det är vid programmeringen jag får börja. Men för att kunna få "lampan att blinka" behövs det ju en "lampa", troligen behövs också en hel del andra "grejer"....
Har någon något tips om ett "startpaket" som skulle funka för mig, får nog börja på mycket låg nivå....
/gurra
Postat: 14 september 2008, 21:43:40
av Icecap
Jag gillar PIC när jag ska göra enklare projekt, sodjan har programmeringsenheter + PIC och kan nog stycka ihop ett paket åt dig.
Andra svär till AVR, några gillar Cola och andra öl...
Mycket beror ju på VAR du vill komma, om ditt slutmål är autopiloten duger PIC alldeles förträffligt (och nästan alla andra typer av µC) men då du inte kan speciellt mycket om det i nuläget är det självklart svårt (omöjligt?) att svara på, vad du bör ha klart för dig är att antalet projekt kommer att öka exponentiellt med kunnandet.
Det finns en hel del ställen en µC skulle vara mycket praktisk att ha...
Postat: 15 september 2008, 20:45:59
av gustav t
Första steget mot att få se en "lampan blinka" är taget, saker är beställda.
Tackar härmed för visat intresse..... tack.. /gurra
Postat: 15 september 2008, 22:19:37
av Icecap
Keep us informed...
Postat: 17 september 2008, 03:16:38
av Peter_L
Jag har byggt en autopilot med en pic som styrenhet en gång...
Mitt andra tips är att ha en serieport (el liknande) kopplat till enchipsdatorn och att du först bara skriver ett program så den kan prata med en vanlig lapptopp. Sen utvecklar du själva styrprogrammet i lapptoppen så att du kan hålla på och göra ändringar och finslipa programmet medan du är ute med båten. Sen när du har ett bra fungerande program, då bränner du in det i enchipsdatorn.
Felet jag gjorde var att jag bara körde efter GPS, det är mycket bättre att ha en kompass också. Jag köpte en kompassmodul, men det visade sig att det minsta den lutade åt något håll så stämde det inte alls. Vilket inte är så bra i en båt, så en bra kompass som klarar lutning krävs.
<-- video klipp på den
Sen blev det att jag köpte en riktigt autopilot (Raymarine st1000+).
Postat: 17 september 2008, 08:17:47
av Gimbal
Gjorde nästan samma resa, började bygga en autopilot och hade en labbkoppling med en Atmega88, GPS, servo, rodergivare och display. Det såg ut att funka när jag "testkörde" genom att gå runt på en parkering. Sen bytte jag båt, och den nya båten hade redan en autopilot så projektet lades ner.
En parantes, är för övrigt inte helt nöjd med den nya autopiloten då dess elektroniska kompass i vissa riktningar inte alls stämmer med verkligheten. Det ställer till det då GPS'en skickar kursangivelser och båten sen styr 15 grader fel. Att träffa en waypoint ger väldigt knepiga manövrar. Grrrr.