Sida 3 av 4
Postat: 11 april 2007, 16:48:41
av JBV
Det visar sig att jag hade lyckats förstöra gate driver ic:arna

Får beställa nya och rita upp en ny separat h-brygga...
Postat: 13 april 2007, 13:20:47
av Nihilim
Kan bidra med en HIP4081A om du behöver en fetdrivare.
Postat: 13 april 2007, 13:57:37
av JBV
Har beställt 4 IR2111 så det är lungt

Postat: 21 augusti 2007, 07:14:38
av JBV
Nu har jag till slut återupptagit detta projektet!
Har jag "översatt" formeln korrekt till kod?
Kod: Markera allt
Formel:
CO(k) = CO(k-1) - Kp * [PV(k) - PV(k-1)] + Ki * T * e(k) - kd / T * [PV(k) - 2PV(k-1) + PV(k-2)]
Pseudo kod:
PV_2 = PV_1;
PV_1 = PV;
e = SP - PV;
P_term = Kp * (PV - PV_1);
I_term = Ki * T * e;
D_term = (kd / T) * (PV - (2 * PV_1) + PV_2);
CO = CO - P_term + I_term - D_term;
Formeln är
Typ C härifrån!
Postat: 22 augusti 2007, 23:50:52
av Chribbe76
Jag tycker att det du skrivit motsvarar orginalformeln men jag fattar verkligen inte hur den kan fungera.
e finns bara med i I_term, hmmm....
Alla PID-parametrar accumuleras till CO, Jag är helt lost.
Jag måste nog testa att simulera den i morgon om jag ska kunna sova gott på nätterna.

Postat: 23 augusti 2007, 00:32:32
av JBV
Jag hittade en implementering av formeln här:
http://home.hccnet.nl/e.vd.logt/htm/reg ... k.htm#PID2
Den är lite omvänd då den räknar ut P och D negativt och adderar allt i slutet istället!
Jag tror jag ska slänga ihop ett litet test också!
Postat: 23 augusti 2007, 01:34:22
av JBV
Nu har jag gjort ett enkelt test:
Kod: Markera allt
int main()
{
//Globala variabler
int T, E;
int SP, PV, PV_1, PV_2;
int CO;
float Kp, Ki, Kd;
//Inställning
Kp = 1.0;
Ki = 1.0;
Kd = 1.0;
T = 1;
//Nollställ variabler
SP = PV = PV_1 = PV_2 = 0;
CO = 0;
while(1==1)
{
E = SP - PV;
float Pt = Kp * (PV - PV_1);
float It = Ki * T * E;
float Dt = (Kd / T) * (PV - (2 * PV_1) + PV_2);
CO = CO - Pt + It - Dt;
PV_2 = PV_1;
PV_1 = PV;
cout << "SP: " << SP << " PV: " << PV << " Error: " << E << " CO: " << CO << endl;
PV += CO * 0.25;
system("pause");
SP++;
}
}
Controller output påverkar Process variabeln med 25% "verkningsgrad"
Detta blir resultated av koden:
Kod: Markera allt
SP - PV - E - CO
-----------------
0 0 0 0
1 0 1 1
2 0 2 3
3 0 3 6
4 1 3 7
5 2 3 9
6 4 2 8
7 6 1 7
8 7 1 8
9 9 0 5
10 10 0 5
11 11 0 4
12 12 0 3
13 12 1 5
14 13 1 4
15 14 1 4
Sedan verkar den stabilisera sig på CO 4 pga upplösningen.
Som mest var felet 3 så jag orkar inte trimma in P, I och D något
Men det verkar ju fungera utmärkt vid en så linjär "last" och stegning som jag programerade för iaf!
Edit: när jag får orken ska jag hacka ihop ett grafiskt test. Tänkte man kör SP 0 i 50 steg, sen SP 50 i 100 steg sen SP 0 i 100 steg till...
Sen plottar man ut SP Versus PV.
Tänkte slänga in sliders för P, I och D så man lätt kan justera parametrarna också!
Postat: 23 augusti 2007, 05:50:04
av 007sweden
Vad kul, en till från Älvsbyn!
Trodde jag var ensam här.
Postat: 23 augusti 2007, 07:00:16
av JBV
Världen är liten!
Sitter och funderar på hur man primitivt skulle kunna simulera en servo med enkoder...
Om vi tänker oss en motor på max 3000 RPM @ 100V, 400 pulser per varv och en dc spänning på h-bryggan av 100V samt PID på 1kHz:
100/256 = 0,390625 V upplösning
3000/100 = 30 RPM / V
0,390625 * 30 = 11,71875 varv per 1/256 PWM Dutycycle och minut
11,71875 / 60 = 0,1953125 varv per per 1/256 PWM Dutycycle och sekund
0,1953125 / 1000 = 0,0001953125 varv per 1/256 PWM Dutycycle och PID loop.
Detta tal multipliceras först med PWM från PIDen och adderas/subtraheras från en räknare varje PID loop beroende på riktning.
1/400 = 0,0025 varv per puls. Varje gång räknaren ser en summerad ändring större än en puls så ändras Process variabeln.
Har jag tänkt rätt? (om man bortser från att den är helt opåverkad från fysikens lagar)

Postat: 23 augusti 2007, 17:02:27
av JBV
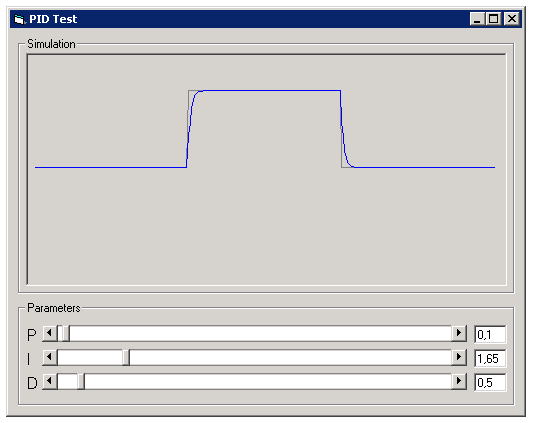
Nu har jag knåpat ihop ett grafiskt test, dock har jag bara prövat PV = CO * 0.25 ännu. Ska skriva in en enkel servomodell senare!
Kurvan är: 0 - 50 - 0
Postat: 24 augusti 2007, 19:01:18
av Chribbe76
Jag blir inte riktigt klok på den PIDen, mina tester gav bara konstiga resultat.
Det verkar som om jag gör något fundamentalt fel men jag ska göra ett nytt försök om några dagar.
Har du provat att simulera med ett rörligt(interpolerande) mål?
Postat: 24 augusti 2007, 19:05:18
av JBV
Jag råkade bli full innan jag hann testa... HEY WTF GÖR JAG HÄR?
Postat: 24 augusti 2007, 19:06:06
av JBV
Btw så känns det bara som I påverkar kurvan positivt

... måste fixa bättre simulering eller en riktig servo
Postat: 26 augusti 2007, 11:02:22
av Millox
Um, jag tycker det där ser minst sagt konstigt ut...
Om jag tolkat variablerna rätt:
SP = set point, dvs börvärde.
PV = Present value, dvs nuvärdet.
PV_1 = föregående värde
PV_2 = förr-föregående värde.
E = error, felet.
CO = controller output, dvs det du matar ut till vad det nu är.
Då tycker jag att:
P-termen i ditt första värde ser mycket mer ut som derivata-termen. Det borde vara felet som multipliceras, inte skillnaden mellan nuvarande och föregående värde som ju ungefär är derivatan.
I-termen är din proportionella förstärkning eftersom du bara multiplicerar felet med något här.
D-termen är skum.
Du borde göra såhär istället:
PV_1 = PV;
PV = läs in pv;
E = SP-PV;
E-integral = E-integral + E;
P-term = Kp * E;
I-term = Ki * E-integral;
D-term = Kd * (PV-PV_1);
CO = P-term + I-term + D-term;
I Kp, Ki och Kd förkortar du bort alla andra konstantberäkningar(vilket iofs kompilatorn sannolikt gör åt dig i alla fall).
Det här borde ge dig en enkel och smidig pid-regulator, sätt någon av Kp,Ki,Kd till noll för att ta bort någon regulatordel.
Postat: 26 augusti 2007, 18:17:42
av JBV
Detta är ju en "Allen Bradley Logix5550 Independent PID equation" eller "textbook PID":
CO = CO + Kp * [E - E_1] + Ki * T * E + (Kd/T) * [E - (2 * E_1) + E_2]
Såvtt jag förstått allt är skälet till att man tar bort Setpoint från P och D är att stora förändringar i setpoint inte ska påverka controller output. Istället ska bara felet samt förändringstakten av process variabeln påverka.
Jag ska pröva den ovan istället senare ikväll!